We develop sustainable solutions for projects in the range £5,000 to £2,000,000 utilising the HDD technique. We have the required specialist skills, knowledge and capability to deliver solutions with our own rigs and equipment operated by trained and experienced crews. The range of services we offer include;
- Supply and install 25mm to 900mm diameter pipe
- Plastic and steel ducts and pipes
- Welding and testing of product pipe
- Specialist crossings
- Design input and assistance
- Turnkey packages

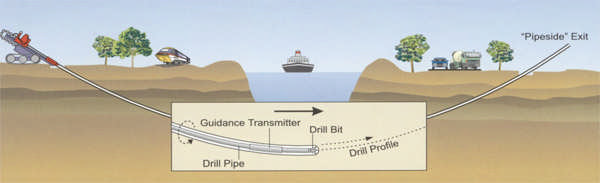
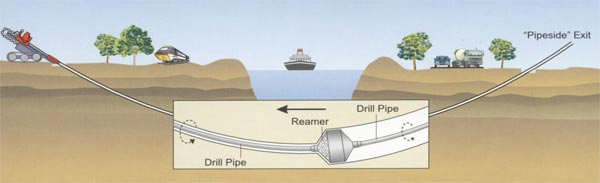
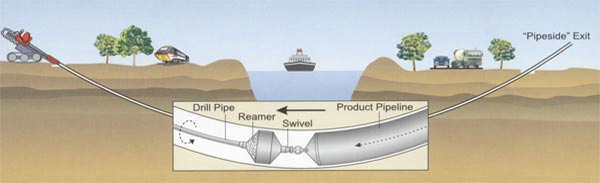
The Process